
先日Twitterで晒したやつ。
そろそろ弄る場所も無くなるかと思ったら大間違い。
反対軸のネジや軸受けを変更するので弄るネタはまだまだあるのですよ…
M2真鍮ネジ+カラー+ワッシャー
↓
M3ポリカネジ+ブッシュ
実際のところサーボの固定用に買ったセットですねこれ。
サーボがサーボだけに、軽量化できるからと変更を決めました。
サーボホーンの固定までM2ポリカにするのは流石にやりませんが。
あと他にも変更しない場所があったりもします。

〆切前に他の作業が捗るって(殴
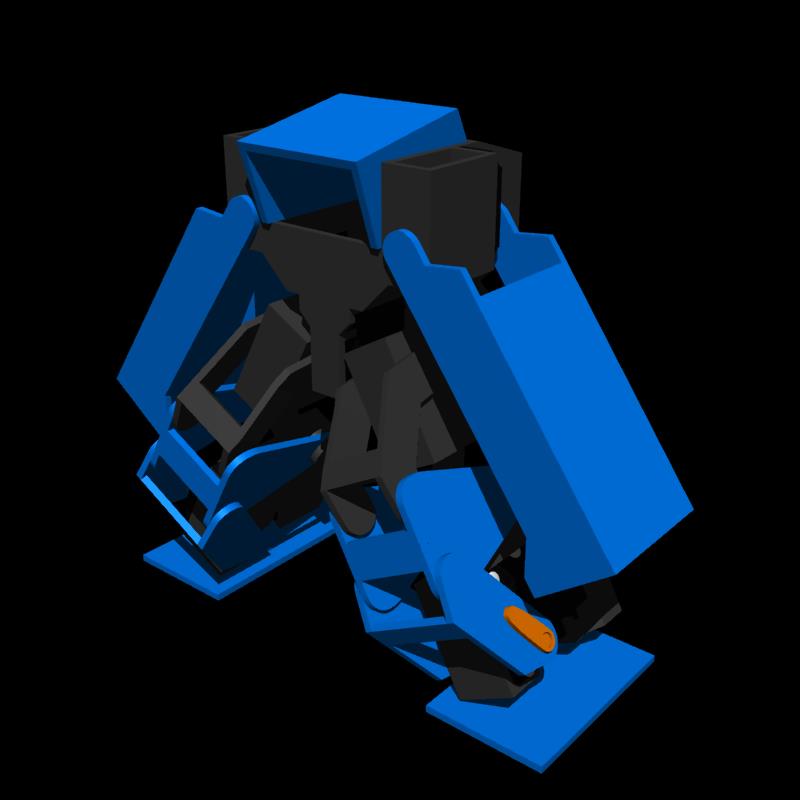
どうも、ごーすとです。
先日のモデルを修正しました。
・マイクロMGの仕様変更に伴いホーンの色を修正
・ネジの追加(サーボケースのネジ以外)
・足首ピッチ軸のホーンが目立ったので内側になるように股関節とは別形状のブラケットに変更
ざっとこんなもん。
胴体内部はつくっていないですがこれはもう製作時にその場でやってしまおうかと。
冬休みで授業なくなったタイミングで何か業務でもない限りモデル弄るのは無しの方向で。
話は変わりますが、私はサーボケースの反対軸にあまり魅力を感じていないです。
私のロボット見ればわかる人もいるかと思いますが、欲しい幅に合わせてサーボの裏側に空間作ったり、サーボホーンにフレーム固定するのもホーンの表だったり裏だったり、だいぶ好き勝手やっています。
この辺、他の人から見たらだいぶクセの強い設計してると思うのですよね。
ロボット用のサーボなんかケースに反対軸がついてフリーホーンがついてると幅が決まるので、それに合わせる設計でうまくやってる人の意見なんかも聞いてみたいです。
絶対に私の盲点がゴロゴロ出てくると思うのですよ。
サーボホーンの上にスペーサー噛ませて幅稼ぐのもそうでしたし、最近某氏が公開したスペーサー噛ましたうえで隙間作って配線通すのなんか考えた事すら無かった技術ですからねぇ・・・

どうも、ごーすとです。
わんだほーに参加したVespineの改良案がまとまってきました。
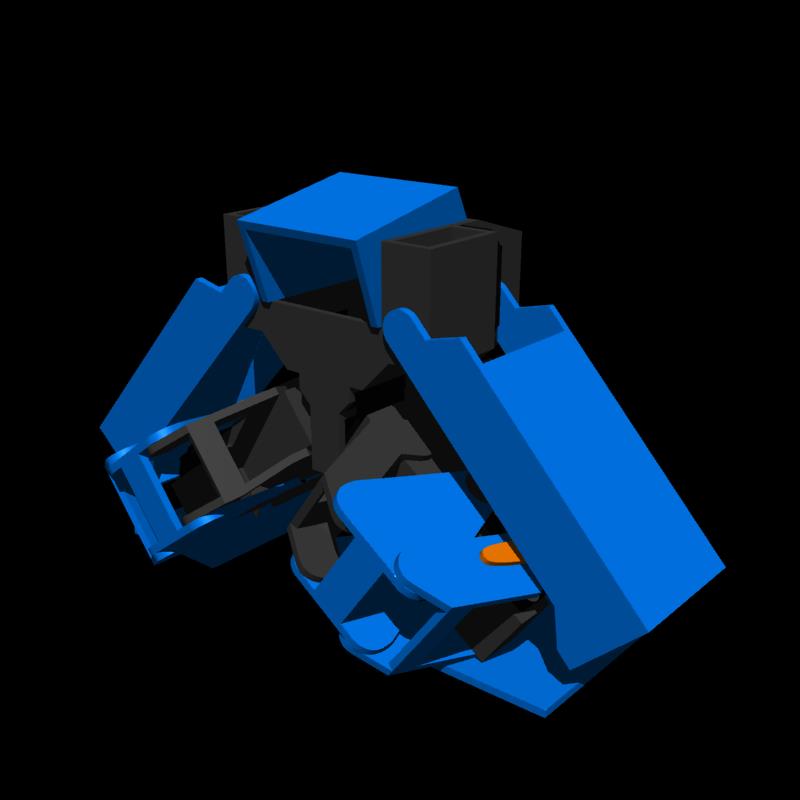
もともと作りやすい機体を意識しており、動作についてはROBO-ONE Light基準で考えていた機体でした。
なので前後歩行がオマケ程度だったりしたのですが、それで作っておいて自分が納得できなかったので歩幅を2倍に。
あと満足できなかったのが自分なのでもういっそデータ公開とか考えない自分専用機で結局発泡塩ビの曲げを含む設計に。
という訳で下半身の形状をまとめ、それをベースに細かいところの調整をして、という作業を
冬のイベントの原稿をサボってやっていたのが昨夜と今夜の話。
いい感じにまとまったかなと思えるところまでできました。
前回はジャンプ旋回時に電力不足だったのでバッテリーを後から増設しましたが、今回はもう最初から2個積むからと上半身を小型化。
背が低くなって下半身の重心も下がっている筈ですが全体での重心はROBO-ONE規定をクリアできる筈です。
・・・いや、重心計算とか出来るCADは使っていないのでサーボとバッテリーとマイコンの重量と脚の付け根からの距離から計算しただけなんでフレームやネジや接着剤の重量次第でいくらでも狂う訳ですが。
こんな設計と言えないような雑な作業をいったい何年続ける気だって話ですねぇ・・・
見た目はいい感じなので、一旦落ち着いたら作ってみようかと思っています。
前回のでも結構打撃の威力はあったので、足首ロール軸で踏ん張れるようにした分もっと強烈な打撃を打つのが年度末までの目標ですね・・・
お久し振りです。ごーすとです。
最近はロボットといえば仕事関係ばかりで書けることが少ないです。
ただ、17軸3万円以内が実現できて歩いたという報告を。
マイクロMG×16+ピコ×1
WR-MSXX
発泡塩ビ
アロンアルファ
ネジ類
バッテリー
以上。無線化しても4万円切りますよやったぁ!
というより大食いサーボの塊と5Aしか流せないコントローラで歩いた事に驚いてる辺り計画性の無さが(ry
さて、そんな事より次回のROBO-ONEですね。
参加したかったのですが、ちょっと微妙になってきました。
というより今の仕事だと参加できない気がゲフゲフ、何でもないです。
プランはありますが、たぶん間に合わないですね。
おそらくこの間のように会場に行くという事すらできないと思います。
作りたい機体はROBO-ONE予選向けなのですが…残念。
とりあえず近況報告でした。





